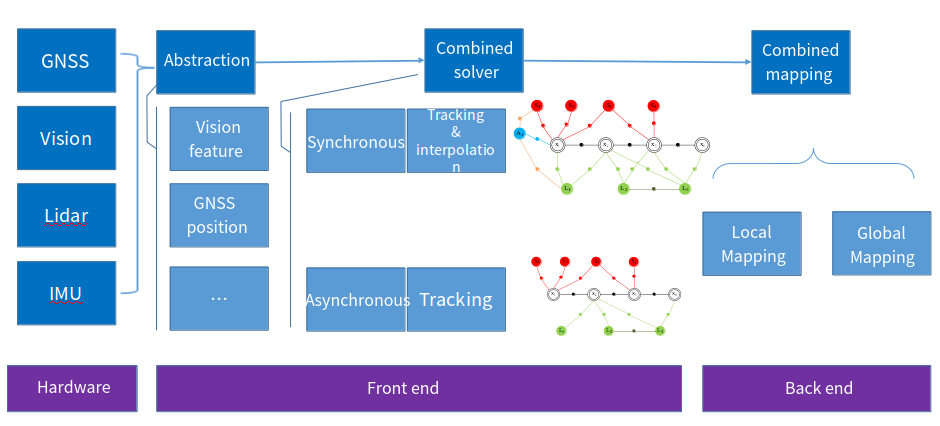
AS SLAM is a versatile, robust SLAM technique: It can be used in various environment and adequate to various of sensors including stereo camera, GNSS, LIDAR, IMU, optical flow etc. In the front end, the system pose is tracked using the combined features abstracted from sensors; In the back end, we design the unified optimization and mapping algorithms. It is able to autonomously initialize itself. The structure of AS SLAM is showed below.


{kind=link}
{kind=link}
{kind=link}