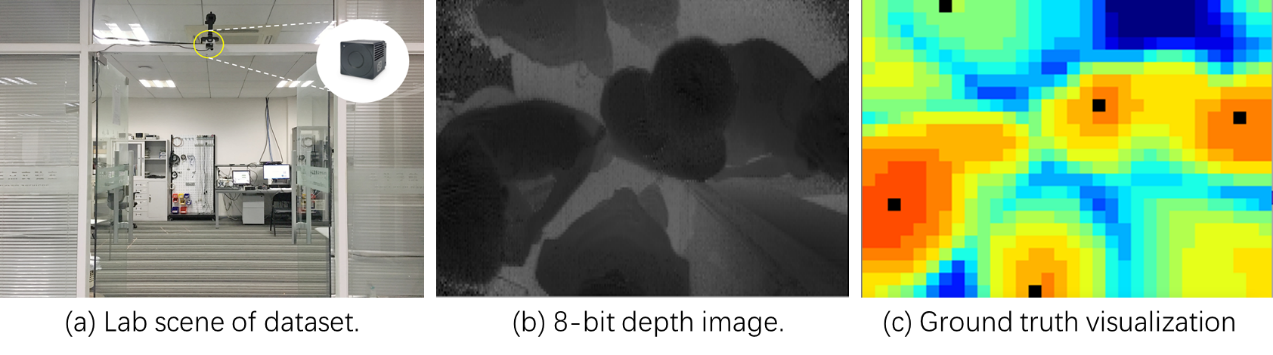

The dataset is recorded by SmartToF camera model TC-E2, which acquires depth images with a resolution of 320×240 at a frame rate up to 60 fps. Besides, the TOF camera provides a field of view of 65°×38° in a standard lens. The maximum measurement range is 6 meters. The mechanical […]
RESEARCH BACKGROUND In the last decades, GNSS navigation has been much improved, compared to survey-grade equipment, low-cost devices performance is not satisfied market demands. Many particular scenarios such as offline shopping or open-air parking need high accuracy positioning. Because the raw GNSS data is unavailable, prior researchers can only […]

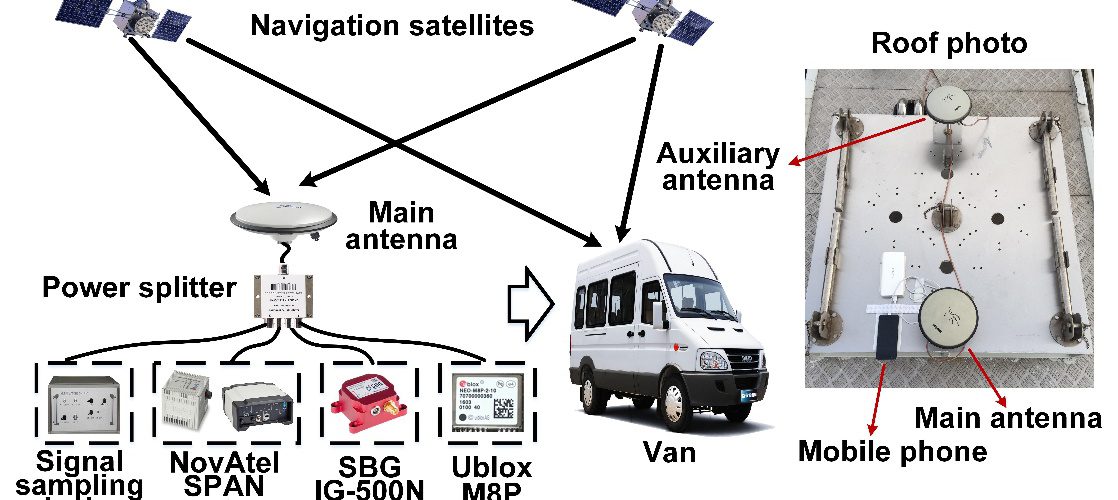
RESEARCH BACKGROUND The open access to GNSS raw measurements on Android smartphones is important for both the development of GNSS and smartphones, as we may experience higher accuracy LBS (Location Based Service) with lower cost devices in the future. Nowadays the ultra-low cost GNSS chipset in smartphone has the characteristics […]

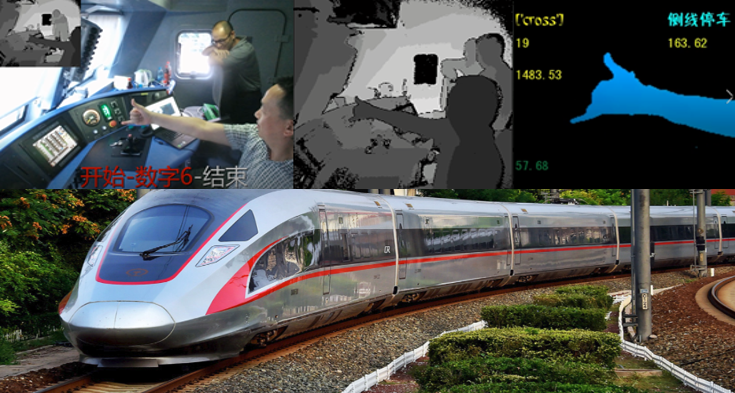
Hand gesture recognition algorithm based on depth vision combined with statistical image processing and shallow CNN 3D-AI GROUP With the rapid development of artificial intelligence technology, hand gesture recognition is becoming one of the most effective and important ways of human-computer interaction. In this paper, the problem of hand gesture […]
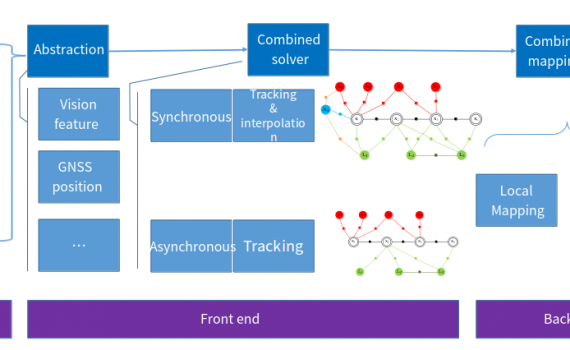
AS SLAM is a versatile, robust SLAM technique: It can be used in various environment and adequate to various of sensors including stereo camera, GNSS, LIDAR, IMU, optical flow etc. In the front end, the system pose is tracked using the combined features abstracted from sensors; In the back end, […]

Abstract: Some students attended the conference of ION GNSS+ 2017 in Portland, America. In this conference, we published three papers which topics are channel modeling, pedestrian navigation and fusion navigation respectively. Full text ION GNSS+ is the world’s largest technical meeting and showcase of GNSS […]