车载行人定位技术是智能驾驶中重要的技术,该技术通过车载视角来识别、定位行人,将行人、车辆作为障碍物在地图上进行标注和提示。该技术的实现对行车安全、自动驾驶、智能导航等领域具有重要的意义,同时也是诸多领域(如行人行为分析、车辆避障)的基础技术。
车载行人定位技术的核心是在复杂的道路场景中处理行人、车辆的信息,主要的挑战包括识别精度及效率。一方面,道路场景复杂多变且车辆高速运行情况所拍摄的图片质量较低;另一方面,车载智能系统对于设备计算时间、设备体积具有较高的要求。因此,目前车载行人定位技术相比较传统的定位技术需要考虑更多的因素。
该技术的实现包括行人检测部分、行人定位部分及地图映射部分。行人检测部分中,系统将采集的图像输入到网络中并利用深度学习算法计算出道路中行人的边界框坐标及行人的数量。行人定位算法接收行人检测算法的结果,结合原始图像计算得到行人相对于车辆的深度距离及角度。最后,地图映射算法接收到行人定位算法的结果并且结合车辆的GPS信息计算出行人的GPS信息并将其信息映射到车载地图上,具体的架构图如下。
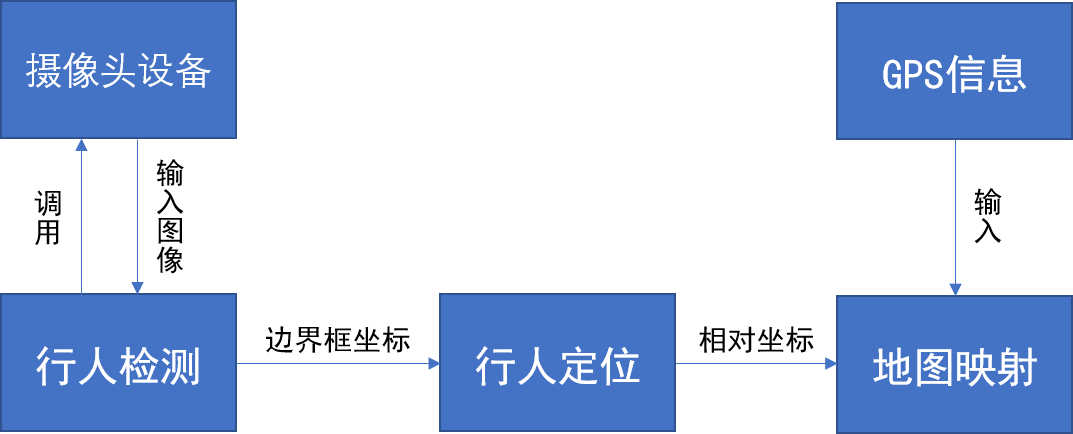
图1 系统架构图
将该系统进行联合的训练来构建最终的行人定位系统。通过车载设备拍摄图像信息,经过该网络的计算输出最终的行人定位信息并显示在车载的地图上。对系统进行联合检测和性能估计,利用不同摄像头在不同场景下均获得优良的效果。
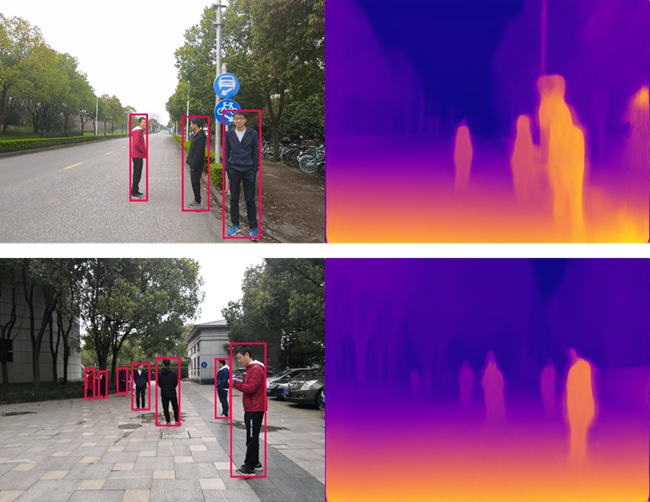
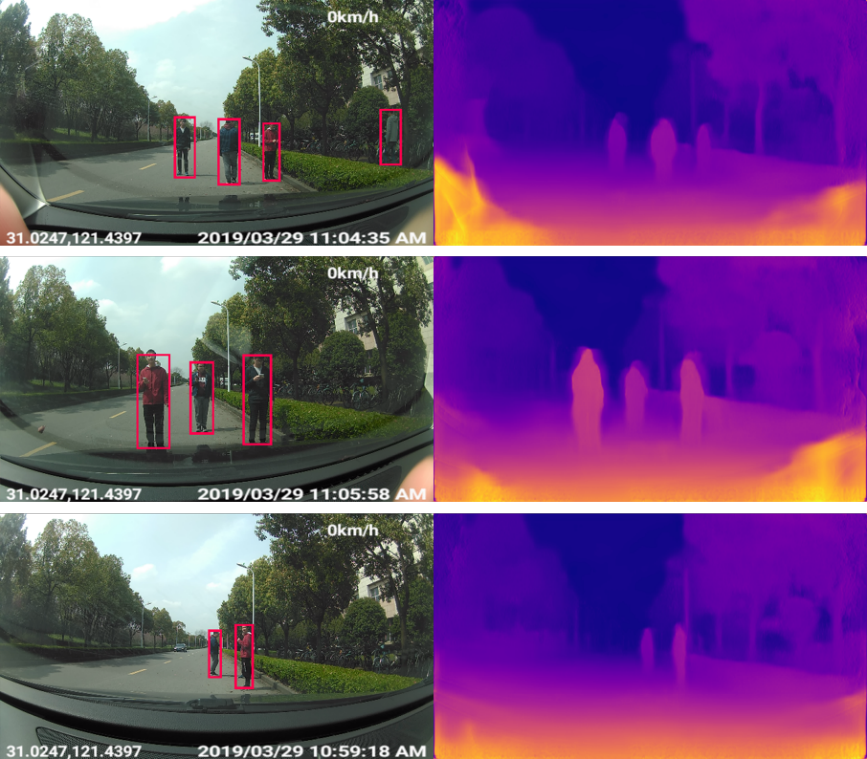
图3 行车记录仪的行人识别与深度估计结果

图4 行车记录仪的行人识别与深度估计结果
通过普通摄像头和行车记录仪的大范围数据采集及实验分析,验证了本算法的可行性。在普通摄像头采集的数据集上,整体定位误差如图5。而在行车记录仪采集的数据集上误差更为明显,说明摄像头的参数性质对结果的影响较大,须针对性地进行图像矫正。
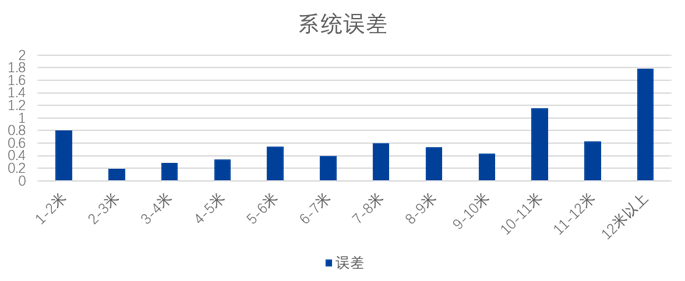
图5 普通摄像头下的误差估计
本技术能够对道路中的行人进行检测、定位及地图映射,对于行车安全、判断道路中行人行为具有重要的意义。本技术采取了公开数据集进行训练并且采集了测试集对系统进行测试,验证了本技术的可靠性。


{kind=link}
{kind=link}
{kind=link}
{kind=link}