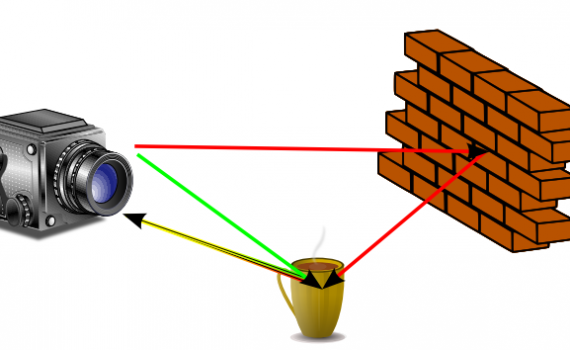
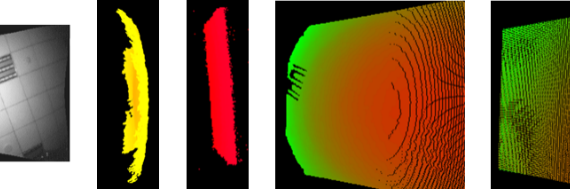
ToF深度相机是目前的三种主流深度相机之一。和双目相机、结构光深度相机的原理不同,ToF相机向目标场 […]
架构特点 1)整体为串并行混合架构,3个尺度并行处理,超过3个尺度依次串行处理,增加灵活性。 2) […]
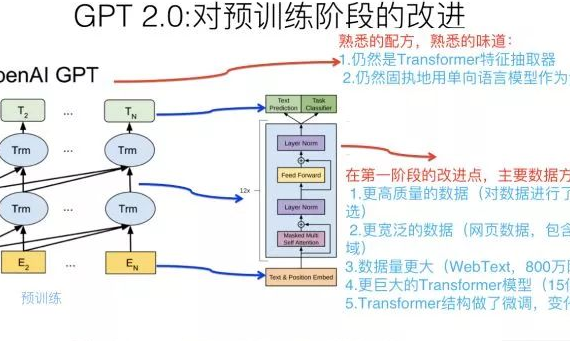
在谈GPT 2.0之前,先回顾下GPT 1.0,过程参考下图 简述如下:GPT 1.0采取预训练+F […]
车载行人定位技术是智能驾驶中重要的技术,该技术通过车载视角来识别、定位行人,将行人、车辆作为障碍物在 […]
随着工业机器人不断的发展,焊接机器人可以把工件完美的焊接在一起,大量节省了时间与劳动力,解决了人工焊 […]
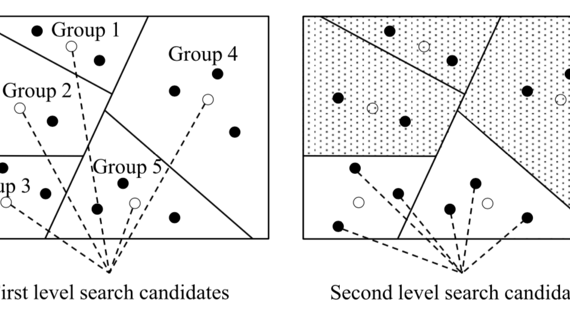
快速的定位声源对于人机交互很重要。现有的声源定位算法可分为波束形成、空间谱估计和到达时间差法三类,而 […]
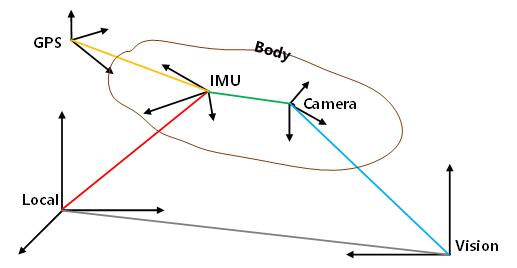
传感器融合是是当前自主导航的重要趋势,主要的原因是由于单一的传感器不能适用所有的场景,所以希望针对不 […]
在定位算法的研究中,数据采集与标定往往会消耗大量人力与时间。为了解决该问题,我们自主研发了基于自主机 […]
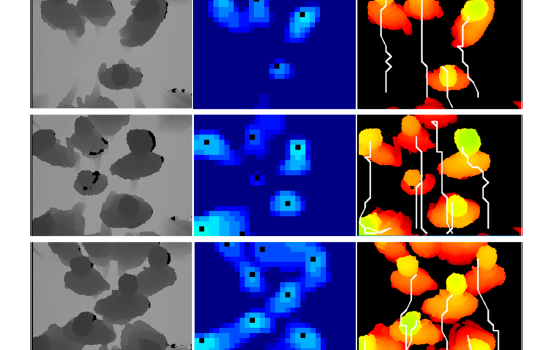
目前最先进的人员检测与客流统计方法主要专注于深度网络架构设计与堆砌上,以巨大的计算量为代价,实现更高 […]
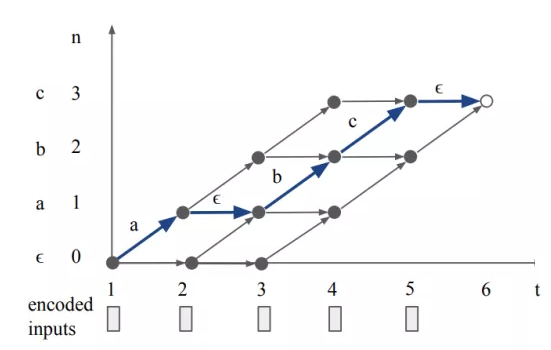
前言: 基于联结时序分类(CTC)的声学模型不再需要对训练的音频序列和文本序列进行强制对齐,实际上已 […]
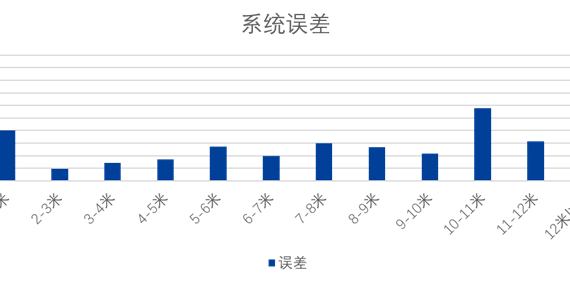
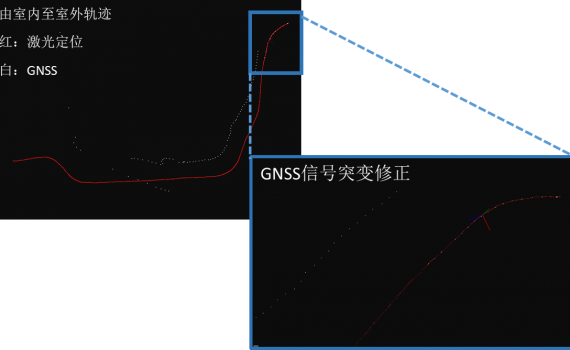
接收机要想解算出定位结果,要求至少有四颗或四颗以上的可见卫星,即接收机至少要同时跟踪四颗卫星。在通常 […]
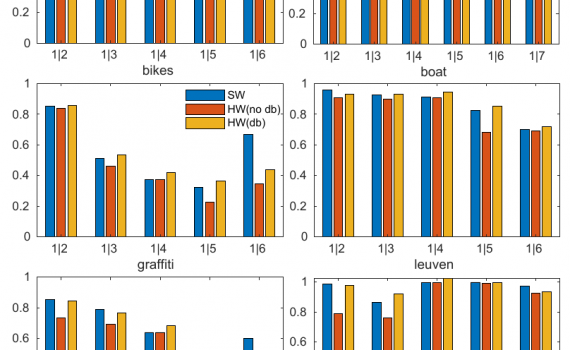
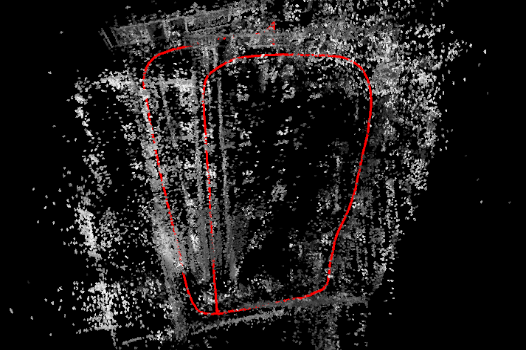
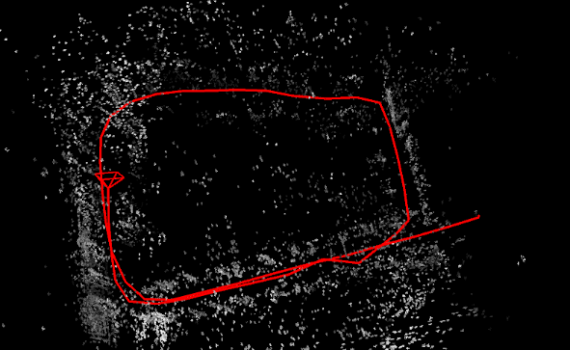
基于直接法的双目回环检测算法实现 在视觉SLAM领域中按照误差方程的不同可以分为特征点法的视觉SLA […]