MAV Datasets for Autonomous Navigation
This web page presents datasets for autonomous navigation of MAVs collected on-board our Micro Aerial Vehicle (MAV). The datasets contain stereo images, IMU , Px4flow, RGB-D camera, ultrasonic ,lidar measurements, and accurate ground-truth of motion capture system Vicon indoors and Ublox RTK outdoors.
MAV Platform
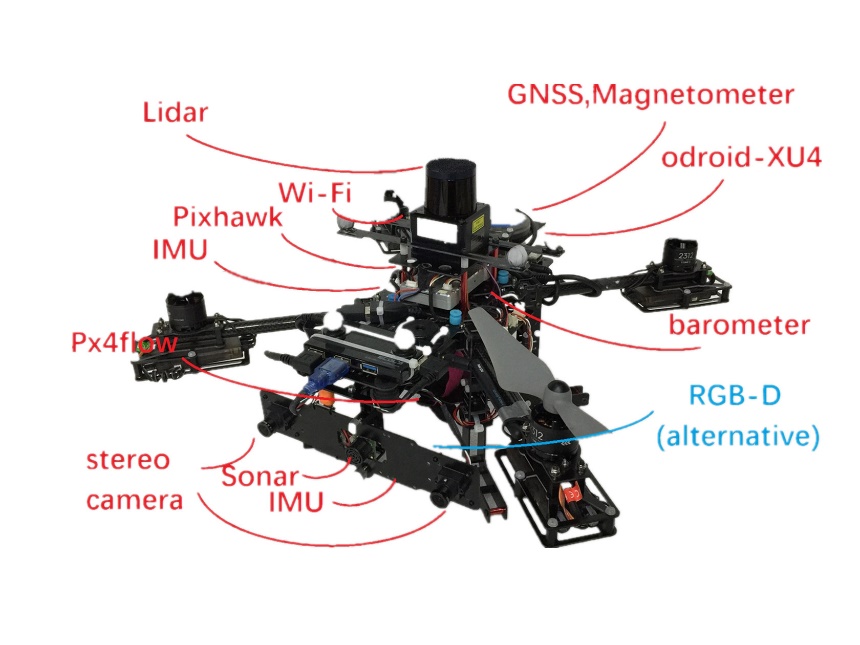
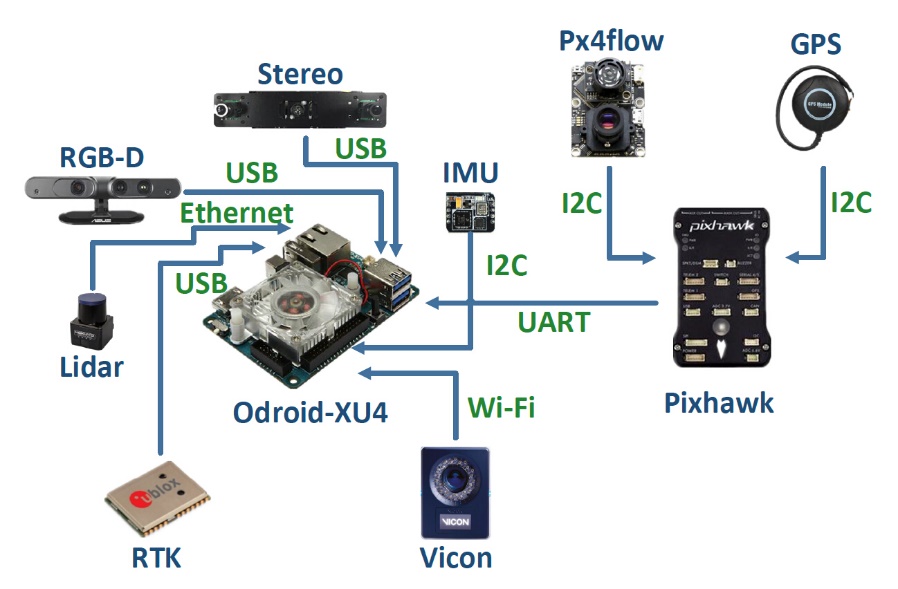
Sensor List
Product model of all sensors used in our datasets are listed:
| Sensor | Product Model | Collection frequency |
| Optical flow | Px4flow v1.3.1 | 20 |
| Stereo camera | 640×480×2 OV7725 | 30 |
| IMU | MPU9250 | 40 |
| Ultrasonic | MaxSonar MB1242 | 15 |
| RGB-D Camera | ASUS Xtion Pro Live | 40 |
| Lidar | Hokuyo UST-20LX | 40 |
| Lidar | Hokuyo UST-20LX | 40 |
| Vicon | Vero 360 | 100 |
| RTK GNSS receiver | Ublox M8P | 10 |
Environments
Our datasets are collected in four main scene:5m×5m×2.5m testing room with Vicon ’ Room’, 8m×12m×5m hall of office with Vicon in part of it ’ Hall’, 20m×20m open square outdoors ’ OutSquare’, and 50m2 area near the building outdoors ’ OutBuilding’.

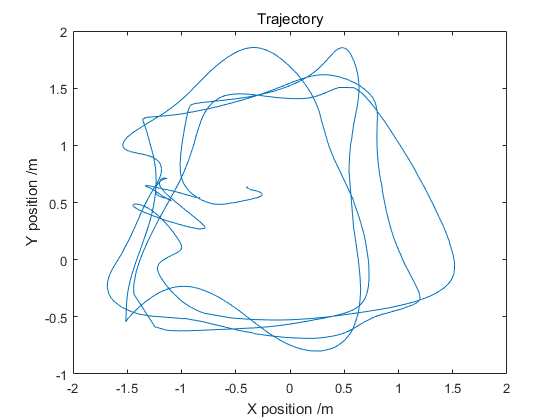
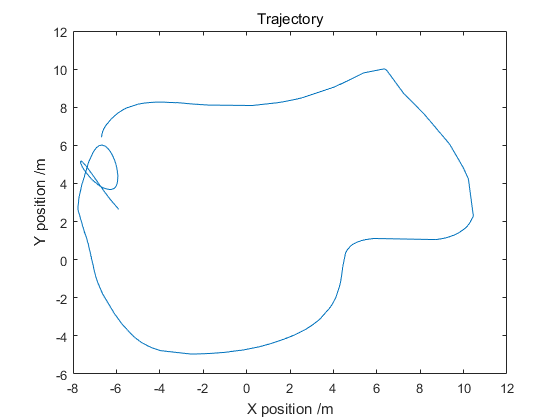
Flight trajectories of datasets in indoor and outdoor scene are shown as following figure. where left one for indoor and right one for outdoor.
Download
You can download our ASNDM datasets from link.
The details of datasets are shown in the table as follows.
| Task | Data | ROS bag |
| SLAM | data link | bag link |
| 3D Model Reconstruction | data link | bag link |
| Obstacle avoidance | data link | bag link |
| MAV State Estimation | data link | bag link |