





Under ideal conditions, standalone Global Navigation Satellite System (GNSS) technology can deliver positioning results with sufficiently high precision. Nevertheless, it suffers from numerous limitations under special operating conditions and application scenarios. For instance, in complex urban environments, multipath components in observations increase drastically. In more extreme cases, observation dropout may […]

In recent years, visual-inertial odometry has been increasingly adopted by researchers for underwater localization. However, due to the difficulty of obtaining ground truth trajectories in open seas, existing underwater localization datasets often lack complete and high accuracy trajectory references, which limits the application of visual‑inertial odometry in underwater scenarios. To […]

Background Driven by the future demand for precise positioning in applications such as autonomous driving, delivery drones, and the Internet of Things, miniaturized and low-power consumer-grade GNSS chips offer distinct advantages. Typical use cases include rotorcraft platforms subject to strict constraints on the weight and power consumption of GNSS modules […]


Aiming to meet the high-efficiency and high-reliability communication requirements of massive spiking neurons in neuromorphic computing chips, in-depth research has been carried out covering key technologies including spiking neuron signal encoding, on-chip network communication architecture, deadlock-free and congestion-aware on-chip network router design, as well as the toolchain for spiking neural […]

Overview In computer vision, deep learning has become a dominant approach for a broad range of applications, from autonomous driving to surveillance and security. Although deep neural networks have achieved remarkable success in solving complex tasks, research has shown that they are vulnerable to adversarial attacks. Such attacks typically involve […]

With the increasing adoption of structured-light and ToF sensing devices in smartphones, tablets, and other devices, the hardware foundation for 3D perception has gradually matured. The 3D market is expected to shift from an emphasis on imaging to an emphasis on perception. Perception, in turn, imposes higher requirements on the […]

The dataset is recorded by SmartToF camera model TC-E2, which acquires depth images with a resolution of 320×240 at a frame rate up to 60 fps. Besides, the TOF camera provides a field of view of 65°×38° in a standard lens. The maximum measurement range is 6 meters. The mechanical […]
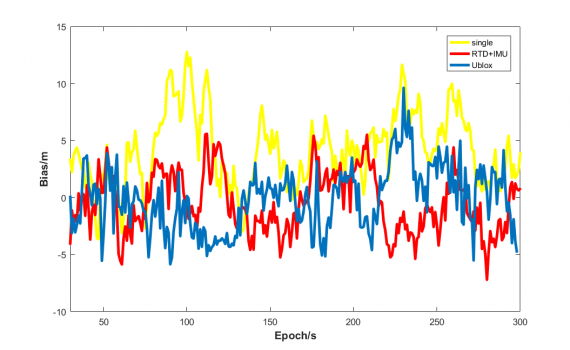
RESEARCH BACKGROUND In the last decades, GNSS navigation has been much improved, compared to survey-grade equipment, low-cost devices performance is not satisfied market demands. Many particular scenarios such as offline shopping or open-air parking need high accuracy positioning. Because the raw GNSS data is unavailable, prior researchers can only […]

RESEARCH BACKGROUND The open access to GNSS raw measurements on Android smartphones is important for both the development of GNSS and smartphones, as we may experience higher accuracy LBS (Location Based Service) with lower cost devices in the future. Nowadays the ultra-low cost GNSS chipset in smartphone has the characteristics […]

Hand gesture recognition algorithm based on depth vision combined with statistical image processing and shallow CNN 3D-AI GROUP With the rapid development of artificial intelligence technology, hand gesture recognition is becoming one of the most effective and important ways of human-computer interaction. In this paper, the problem of hand gesture […]
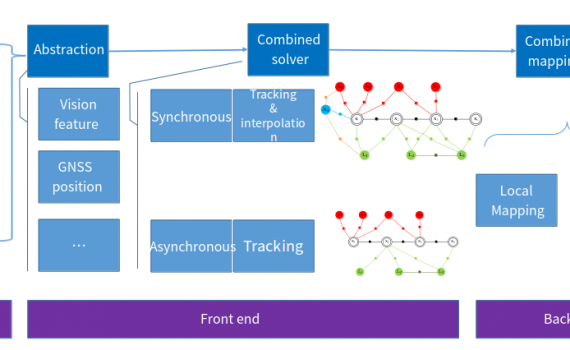
AS SLAM is a versatile, robust SLAM technique: It can be used in various environment and adequate to various of sensors including stereo camera, GNSS, LIDAR, IMU, optical flow etc. In the front end, the system pose is tracked using the combined features abstracted from sensors; In the back end, […]