考虑到水下环境的特点,在数据预处理的时候,摄像头始终放置在防水外壳中。因此,由水、防水外壳和空气之间的折射引起的额外失真被引入系统。在标定水下相机时,传统的标定方法将水-空气折射畸变视为引入额外误差的镜头畸变。因此,我们设计了一种新的水下图像校正水下相机标定模型,利用近似的单视角相机模型分别校正水气折射畸变和镜头畸变。
水下相机畸变矫正的示意图如图1所示。假设有一条光线从三维点发出,并在图像点 处与图像平面相交。 防水玻璃与相机镜头之间的距离用d表示。 防水外壳的厚度远小于世界点的深度。 因此,防水外壳的厚度可以假设为零。 因此,在提出的水下相机校准模型中,折射应该只在水和空气之间发生一次。 此外,假设光轴垂直于水和空气之间的界面。 根据斯涅尔定律,水和空气之间发生的折射可以被定量描述。
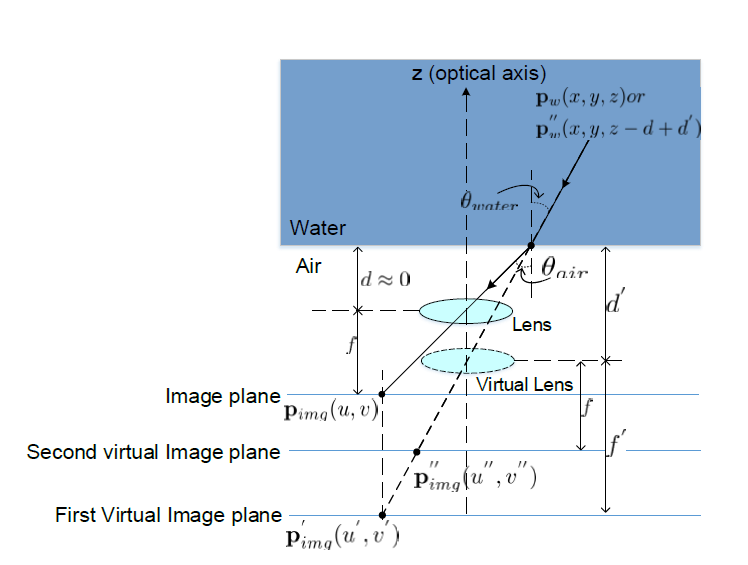
图1 水下相机去畸变模型
通过虚拟设定出两个虚拟成像平面,来去除相机成像时候由于水和空气折射率不同导致的光线折射,最终实现一个近似单视角相机的成像模型,并考虑将镜头畸变和水下-空气折射引起的畸变分为畸变两部分来分别矫正,达到更高的校正精度。
我们采集多幅水下图像用于标定相机的参数。 针孔相机模型和我们提出的水下相机模型的平均重投影误差如2所示。 我们提出的水下相机模型的总体平均误差为0.15像素,比针孔相机模型的总体平均误差小了11.7%。
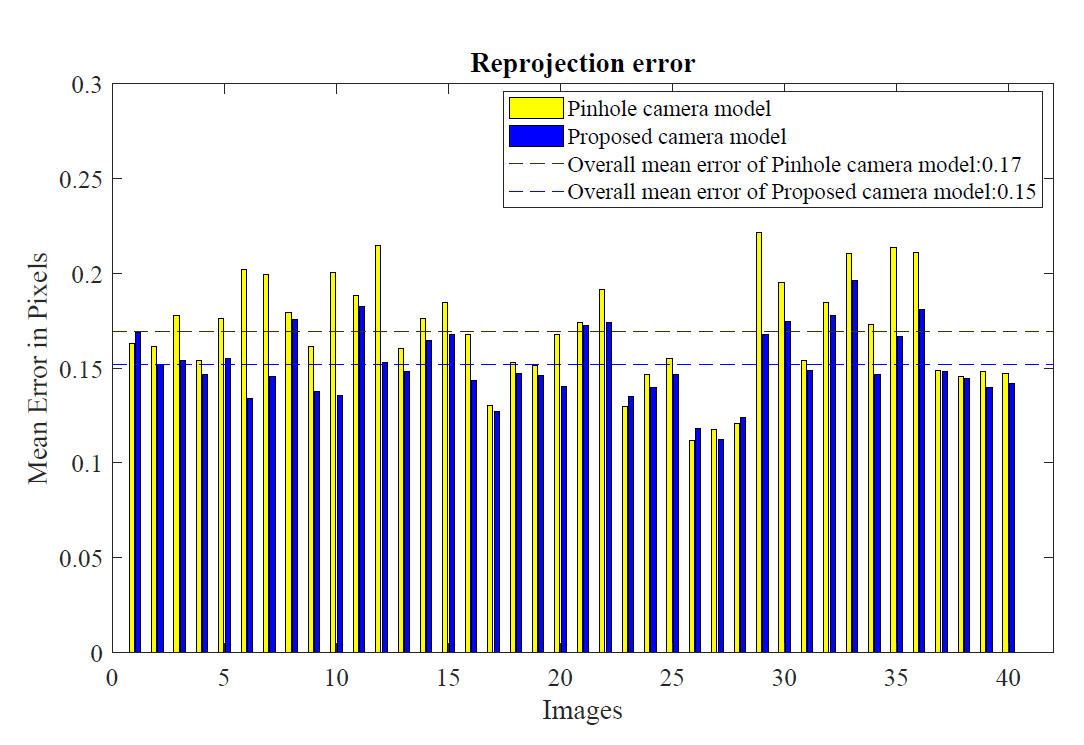
图2 普通针孔相机模型和我们提出的水下相机模型的反投影误差对比
{kind=link}
{kind=link}
{kind=link}
{kind=link}