近年来,视觉-惯性里程计开始被越来越多的研究者们应用于水下定位的研究中。然而,由于在开放海域获取轨迹真值难度较高,现有的水下定位数据集通常缺乏精度高且完成的轨迹真值,这在一定程度上限制了视觉惯性里程计在水下定位方面的应用。为了解决现有水下定位数据集存在的真值不完整、精度不高的问题,我们提出了一个拥有高精度、完整轨迹真值的水下数据集,数据采集环境如图1所示:
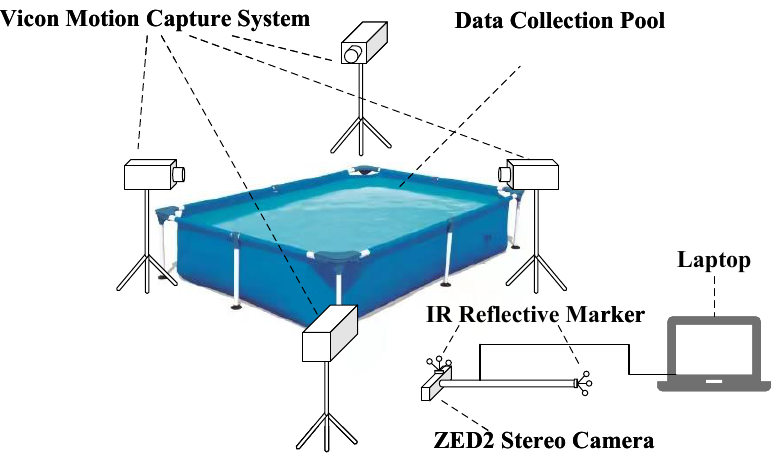
图1:数据集采集环境示意图
在数据采集过程中,我们使用了如图2所示的的采集设备。整套采集设备由一台ZED2立体相机、一根伸缩杆、两套动作捕捉marker组成。其中,图像和IMU数据使用ZED2立体相机采集,为了能够在水下正常进行数据采集,我们对该立体相机作了防水处理。立体相机被固定在伸缩杆的一端,伸缩杆的两端分别固定有两套动作捕捉marker,结合动作捕捉系统就可以获得相机的位姿真值:

图2:核心数据采集设备
为了模拟不同的水下场景,在进行数据采集的人工水池中,我们布置了三个具有不同纹理复杂度的区域,如图3所示:
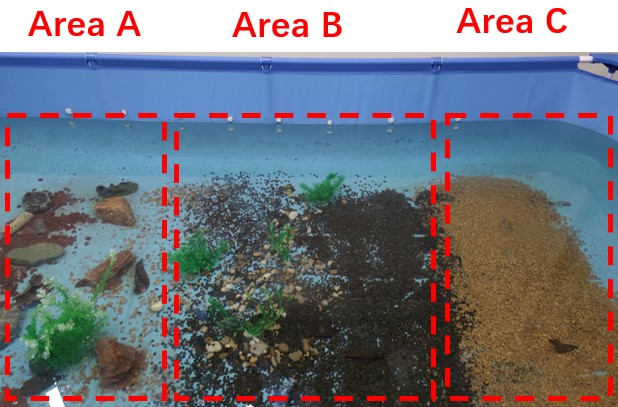
图3:数据采集环境中的三种不同纹理复杂程度的区域
更详细的关于数据集的介绍请见:https://bat.sjtu.edu.cn/zh/haud-dataset/


{kind=link}
{kind=link}
{kind=link}
{kind=link}