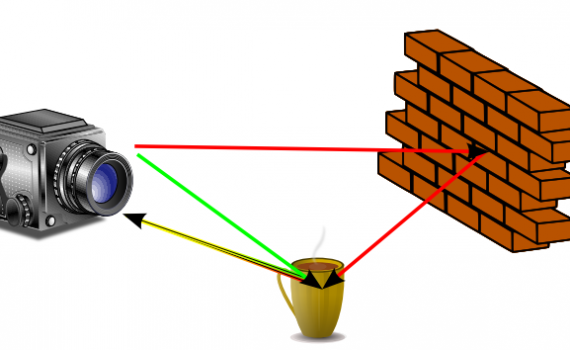
ToF深度相机是目前的三种主流深度相机之一。和双目相机、结构光深度相机的原理不同,ToF相机向目标场 […]
架构特点 1)整体为串并行混合架构,3个尺度并行处理,超过3个尺度依次串行处理,增加灵活性。 2) […]
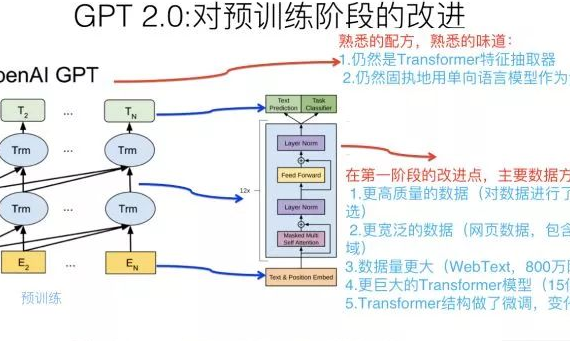
在谈GPT 2.0之前,先回顾下GPT 1.0,过程参考下图 简述如下:GPT 1.0采取预训练+F […]
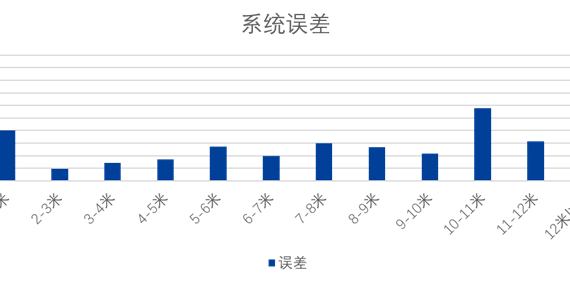
车载行人定位技术是智能驾驶中重要的技术,该技术通过车载视角来识别、定位行人,将行人、车辆作为障碍物在 […]