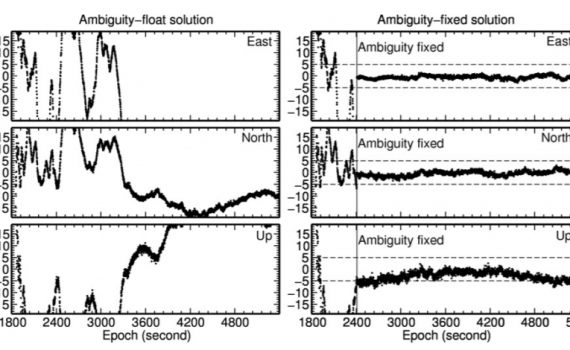
研究背景 在高精度的定位中载波相位由于其极低的噪声以及不受多径效应影响等特点,其观测量精度能够达到厘 […]
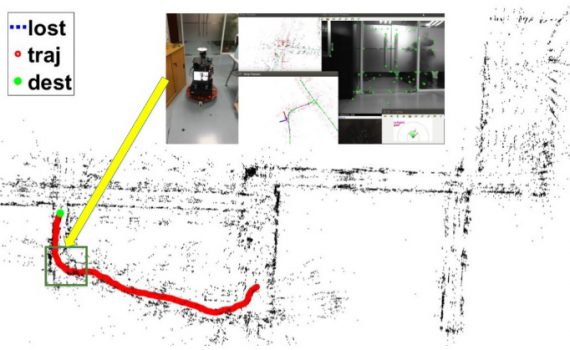
背景 避障是机器人导航必不可少的功能之一。避障算法可分为基于地图(map-based)和反映式(re […]
9月18日,全球知名高科技和制造企业霍尼韦尔来访我中心,进行了为期半天的参观交流。参与领导包括HBT […]
2019年9月11日,来自京东物流-X事业部的人工智能专家兼英国伦敦密德萨斯大学高级讲师杨志军应邀访 […]
RGB相机的驾驶员疲劳检测 日常的行车过程当中,驾驶员常常会因为长时间驾驶或休息不好等原因产生疲惫感 […]
上海交通大学类脑智能应用技术研究中心现面向海内外公开招聘机器人工程师若干。 团队简介: 类脑智能应用 […]
近年来,我国人口老龄化问题日益严峻,老年人的健康问题和日常生活安全问题受到了社会的广泛 […]
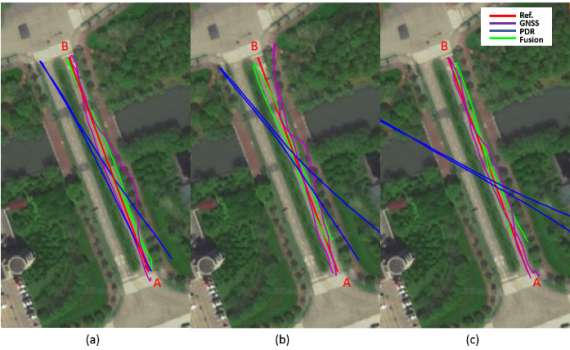
研究背景 基于智能手机的行人航位推算(PDR)由于受限于MEMS器件的低性能,其航向与步长估计会随着 […]
语音是人与人之间交流最自然的方式,对语音信号的采样和处理是通信技术的研究热点。随着音频设备采样率的提 […]
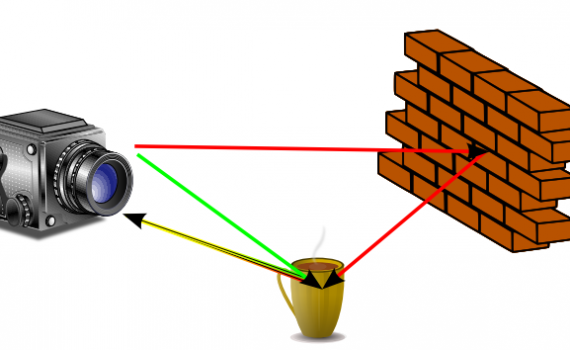
ToF深度相机是目前的三种主流深度相机之一。和双目相机、结构光深度相机的原理不同,ToF相机向目标场 […]
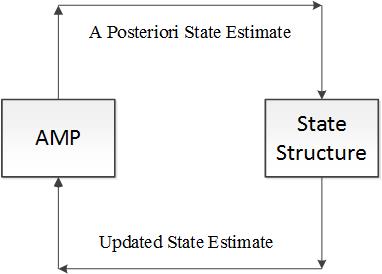
架构特点 1)整体为串并行混合架构,3个尺度并行处理,超过3个尺度依次串行处理,增加灵活性。 2) […]
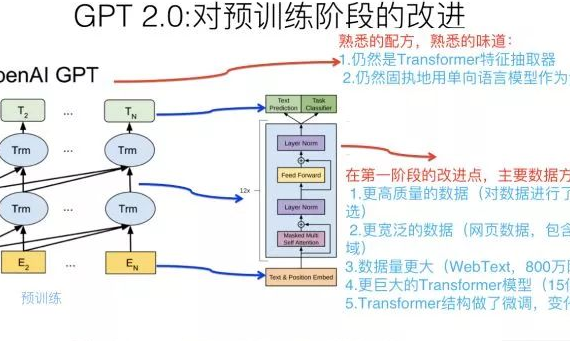
在谈GPT 2.0之前,先回顾下GPT 1.0,过程参考下图 简述如下:GPT 1.0采取预训练+F […]