研究背景
基于智能手机的行人航位推算(PDR)由于受限于MEMS器件的低性能,其航向与步长估计会随着时间增长产生显著的积累误差,从而限制了PDR的实际应用。考虑到室外应用时,手机的GNSS能够提供绝对位置信息,而且两种不同的定位方式的航向与步长误差具有不同的特征,因此,本研究充分分析了两种不同类型误差的特性,并提出了一种可以实时融合PDR和GNSS信息的融合定位框架,从而给出了最优的航向与步长估计。实验结果表明,融合算法相比于PDR或GNSS在偏航程度、抗干扰以及噪声性能等方面都具有优越性。
联合航向估计融合框架
考虑到PDR/GNSS融合算法可以直接借鉴传统INS和GNSS的松耦合方式,如下图(a)所示。其中同步后的PDR系统将输出位置与航向信息,并且与GNSS的位置与航向做差,之后位置与航向残差将被送入卡尔曼滤波器进行校正,最后将校正量返回到PDR系统,形成组合系统的位置与航向估计。但是这种方法的难点是,在卡尔曼滤波器的设计时仍然需要分析位置与航向的观测噪声,在实际应用时,这些噪声与误差的统计特性是难以获取的,不仅如此,最终的位置观测中的误差与噪声分量难以计算,因此在设计卡尔曼滤波器时,参数的选取直接决定了融合系统的滤波效果。
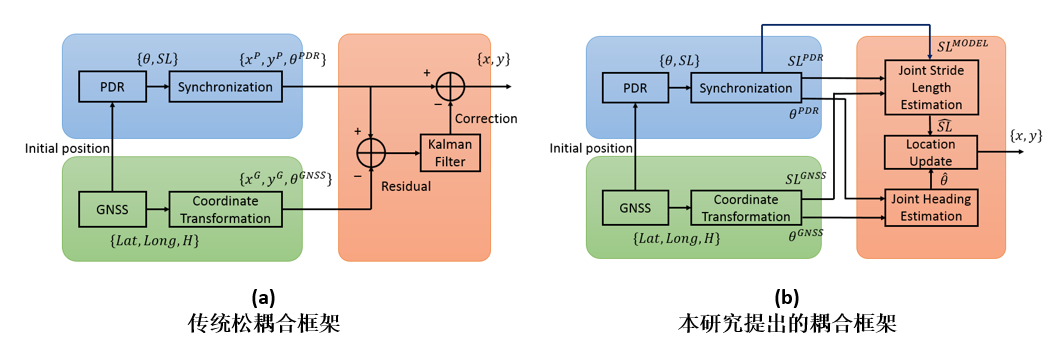
为了降低对卡尔曼参数选择的依赖,本研究给出了另一种滤波思路。该思路基于联合的航向估计,利用自身噪声功率小的PDR航向来平滑噪声大的GNSS航向,不仅如此,因为算法中采用的是差分PDR航向,因此累积误差也得到了抑制。该融合算法的框架示意图如上图(b)所示,在初始阶段由GNSS提供初始位置,这可以用长时间观测的均值。然后PDR输出航向与步长估计,GNSS输出经纬高信息,并且经过坐标转换,从经纬高转换成ECEF XYZ,然后再转换成东北天坐标,最后转换成GNSS航向和GNSS步长。同时PDR经过同步处理之后,与GNSS在固定频率下输出同步后的航向与步长。
实验结果与分析
实验选取的路线是一条直线,有地面标记,其长度为127m,该直线与正北方向的偏角为-19.19°。为了凸显PDR算法随时间误差积累的特点,测试人员沿着直线从A出发,总共往返三次(A-B-A为一次往返),总耗时为540s。
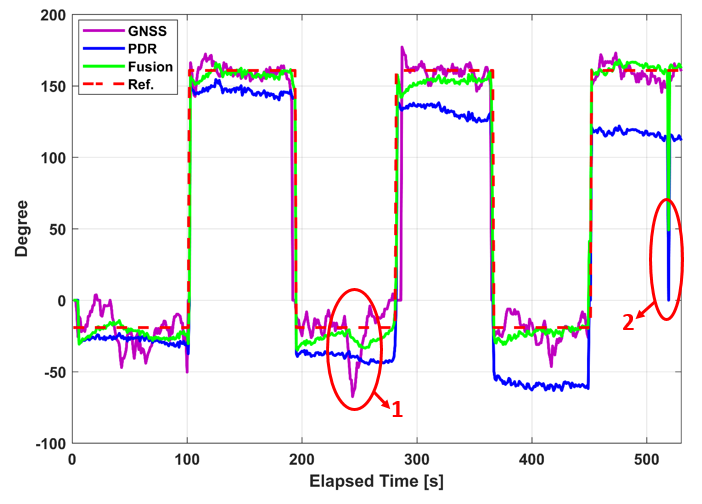
上图展示了GNSS航向、PDR航向以及本文提出的融合算法得到的航向估计的对比。从图中可以看出,GNSS航向不具有时间偏移型,但是其噪声影响了航向估计的准确度,这使得GNSS推导出的行人轨迹不光滑,而且GNSS容易受到环境因素的干扰,比如图中红圈1标注的地方,那一段数据存在很大的波动,这是因为在测试过程中,路边偶尔过往的车辆遮挡所致,这种情况会导致GNSS在那时刻的多径误差突然变大。而与此同时,PDR则不会受到外界的干扰,鲁棒性较高。而融合航向则具备了上述两种航向估计的各自优点,比如没有明显的时间偏置、抗干扰能力增强以及随机噪声降低等特点。图中红圈2给出了在某个时刻检测到的一个慢步,由此可见慢步在行人正常的行走过程中是极少出现的,由于PDR航向估计会检测到慢步,因此融合算法的航向估计同样会表现出慢步的影响,但是这并不会影响之后的航向估计,也就是说,这种现象是无害的。

上图给出了三种方法的最终轨迹图,该图将三次往返过程依次拆解成了(a)(b)(c)三幅图。图中A是路径起点,B是终点。由图(a)可知,PDR方法在瞬时的精度很高,但是会随时间增长而偏航,而GNSS轨迹则表现出较大的波动性,而融合算法的轨迹表现出了与真实轨迹的高度一致性。图(b)中展示了伴随时间增长,PDR的轨迹产生了严重的偏航,已经无法反映行人的真实轨迹了,而在这次往返过程中,GNSS轨迹的扭曲变形是因为受到测试时车辆的干扰,即便在这种GNSS受到严重多径干扰以及PDR产生严重偏航的情况下,融合算法仍然能给出相对光滑、鲁棒以及无偏的航迹。图(c)中的PDR轨迹已经完全失去了意义,而GNSS在这次往返过程中受干扰影响较小,融合算法的轨迹则依然能保持不偏航,说明此时它受到PDR航向估计的影响较小,但它同时继承了PDR航向噪声小的优点,轨迹更加光滑。从三幅图中可以看出融合算法基本杜绝了时间偏移的特性,而且明显增强了抗干扰的能力,实现PDR和GNSS的优势互补。但是我们也注意到这一现象,相比于真实轨迹,融合轨迹的长度缩短了,在图(b)和(c)中表现明显,这主要是融合算法中的步长估计仍然存在少量的累积误差导致的。
总结
通过对比分析PDR和GNSS两种不同定位方式所导致的航向与步长误差,本研究提出了一套有效地PDR/GNSS融合框架。该框架给出了PDR和GNSS数据的同步方案以及关键的航向与步长融合算法。实验结果表明:无论是在航偏、抗干扰还是噪声等方面,融合算法都要优于单独的GNSS或PDR算法,较好地体现了绝对定位和相对定位的优势互补。但与此同时,步长估计精度仍需提高,GNSS航向可以考虑基于噪声更小的多普勒进行推导,融合算法在城市多径环境下的表现仍有待验证,这些都是未来工作的重点。
{kind=link}
{kind=link}
{kind=link}