在定位算法的研究中,数据采集与标定往往会消耗大量人力与时间。为了解决该问题,我们自主研发了基于自主机器人的高精度定位数据采集平台。该平台利用多源传感器融合定位算法、全局路径规划技术等,实现了对室内外位置环境的建图、自主导航数据采集以及高精度轨迹真值生成等功能,达到复杂场景下小于5cm的定位精度以及自主数据采集的功能。

图 1 自主机器人高精度定位数据采集平台
本平台使用了基于SLAM轨迹拓扑地图和球形VFH避障系统以实现在复杂环境下的自主导航避障以及数据采集任务,并开发了人机界面方便开发人员进行数据采集:
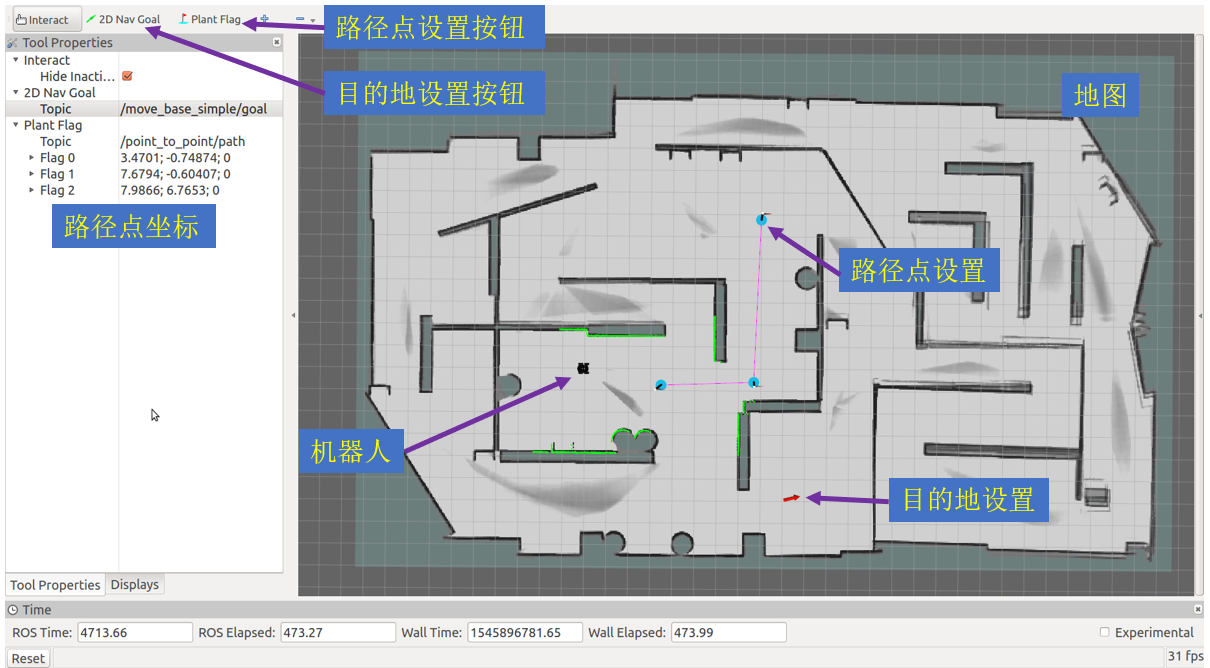
图 2 人机操作界面
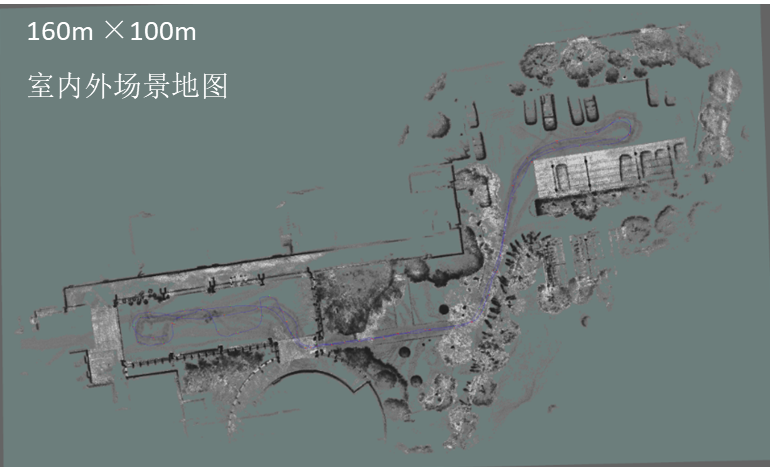
图 3 大场景室内外地图建立
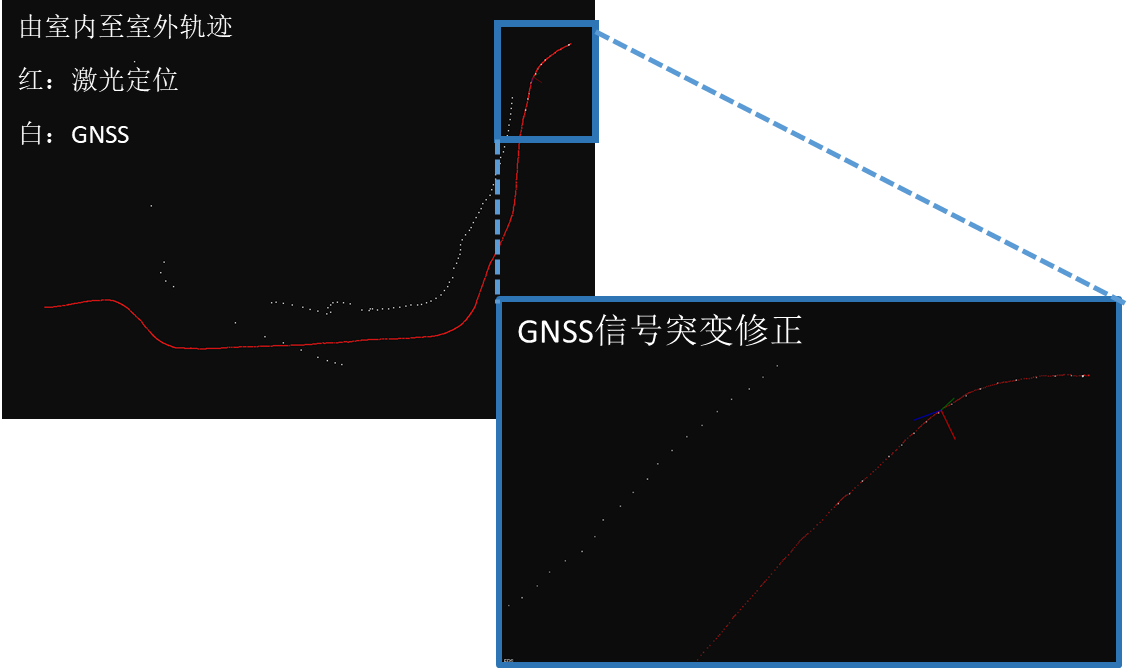
图 4 高精度定位轨迹真值生成

{kind=link}
{kind=link}
{kind=link}