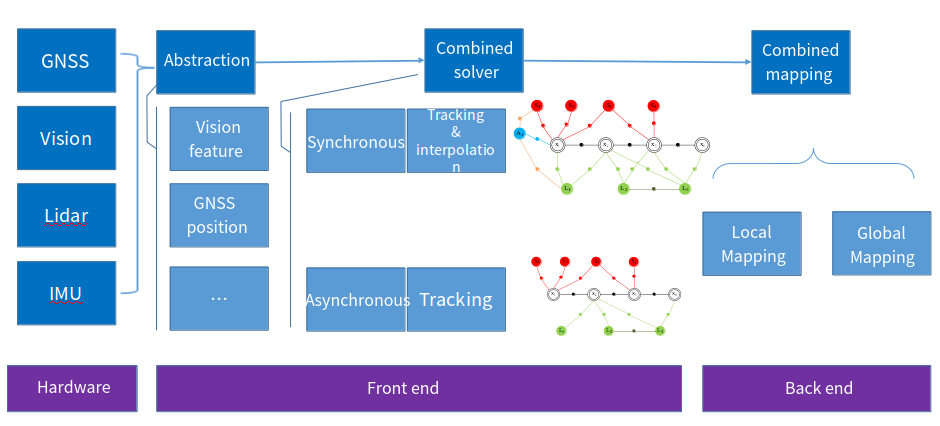
AS SLAM 是一个通用并且鲁棒的SLAM技术:该技术可被用于多种多样的环境里,并且充分地使用了包括双目、GPS、LIdar、光流等多种传感器。在该系统的前端分部分,融合抽象出的个传感器“特征点”跟踪本体的位姿;同时,在后端,我们设计统一的优化算法和建图算法来适应多有的传感器。最后,该系统可以很好地自动初始化。AS SLAM的系统框架如下图所示:
AS SLAM 是一个通用并且鲁棒的SLAM技术:该技术可被用于多种多样的环境里,并且充分地使用了包括双目、GPS、LIdar、光流等多种传感器。在该系统的前端分部分,融合抽象出的个传感器“特征点”跟踪本体的位姿;同时,在后端,我们设计统一的优化算法和建图算法来适应多有的传感器。最后,该系统可以很好地自动初始化。AS SLAM的系统框架如下图所示:
研究背景 三维重建技术已在场景建模、灾害勘探 […]
一.概论 导航终端应用场景的纷繁复杂带来了测 […]
为了提高复杂电磁环境下的定位精度,提出了一些 […]
在计算机视觉领域中,深度学习已经成为从自 […]

{kind=link}
{kind=link}
{kind=link}
{kind=link}