研究背景
三维重建技术已在场景建模、灾害勘探、应急测绘、自动驾驶等多种场景下应用。而基于无人机的三维重建由于具有效率高、覆盖面广、成本低不易受地形影响,因此被更加广泛的应用。然而现有的基于航拍图像的三维重建技术往往只能够重建出包含几何信息的三维结构,无法直接用于导航等自动化应用,这限制了基于航拍图像的三维重建技术的发展。为了使得使用无人机重建的三维地图能够直接用于地面无人车进行导航,提高建图效率,本研究提出了无人机建图-无人车导航的空地一体化建图-导航系统。
系统构成
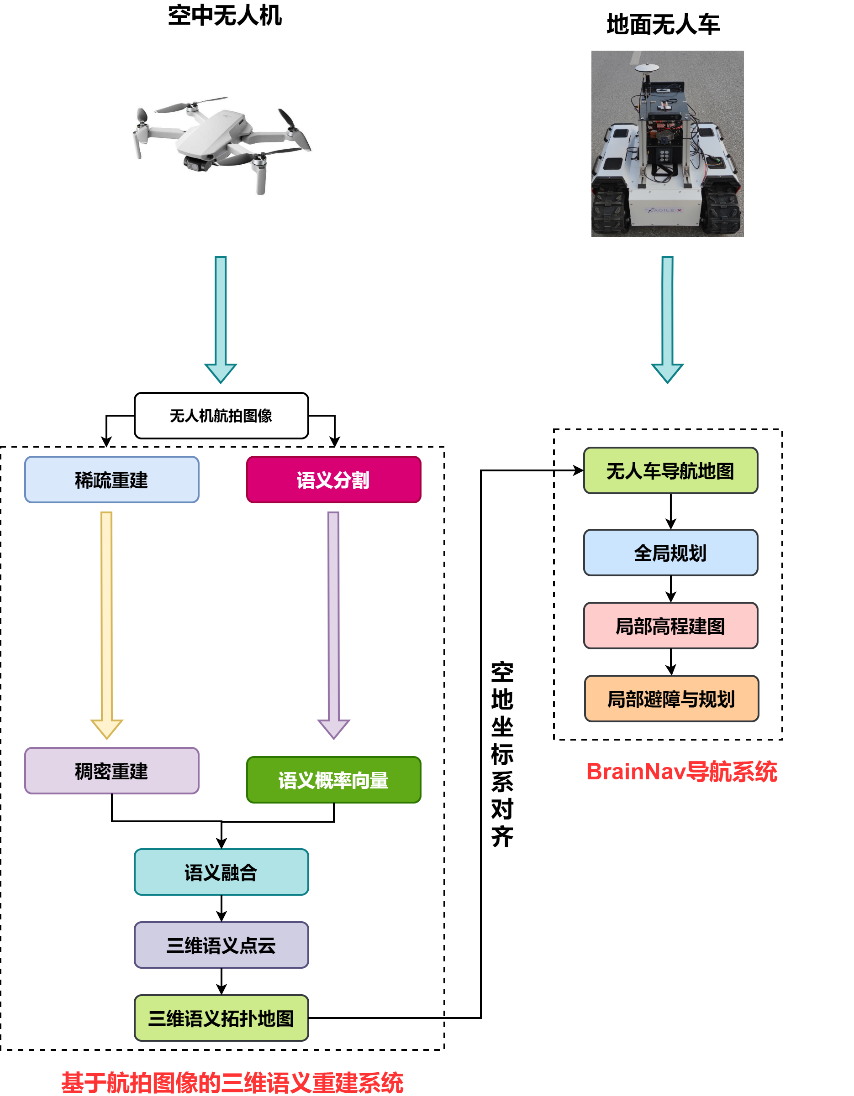
整个系统分为两大子部分,一部分是基于航拍图像的三维重建系统,另一部分是地面无人车导航系统,整个系统能够实现使用无人机建图用于无人车导航的功能。其中,基于航拍图像的三维语义重建系统由四大子模块组成,分别是稀疏重建、稠密重建、语义融合、拓扑提取。系统的输入为带有GPS信息的无人机航拍图像,输出为带有语义信息和拓扑信息的稠密点云。系统首先利用稀疏重建的方式估计出每张航拍图像的位姿以及不同图像之间的共视关系,然后利用稠密重建的方式估算出每张图像的像素级别深度图,并结合语义分割的信息获得三维语义点云。在三维语义点云的基础上进一步提取道路要素,并通过分析拓扑关系最终得到能够用于导航的的拓扑信息。完成语义拓扑地图的构建后,通过将点云坐标系与地面导航坐标系进行对齐,即可使得构建的拓扑地图能够用于地面无人车进行导航。
无人车导航系统BrainNav系统由局部规划、全局规划和局部避障三大模块构成。当确定全局目的地后,全局规划模块会在建图系统构建的语义拓扑地图上规划出一条路径,局部规划模块每次计算出无人车的局部目的地,并通过基于高程图的局部避障模块让无人车避开沿途障碍物到达局部目的地,最终到达全局目的地。
效果展示
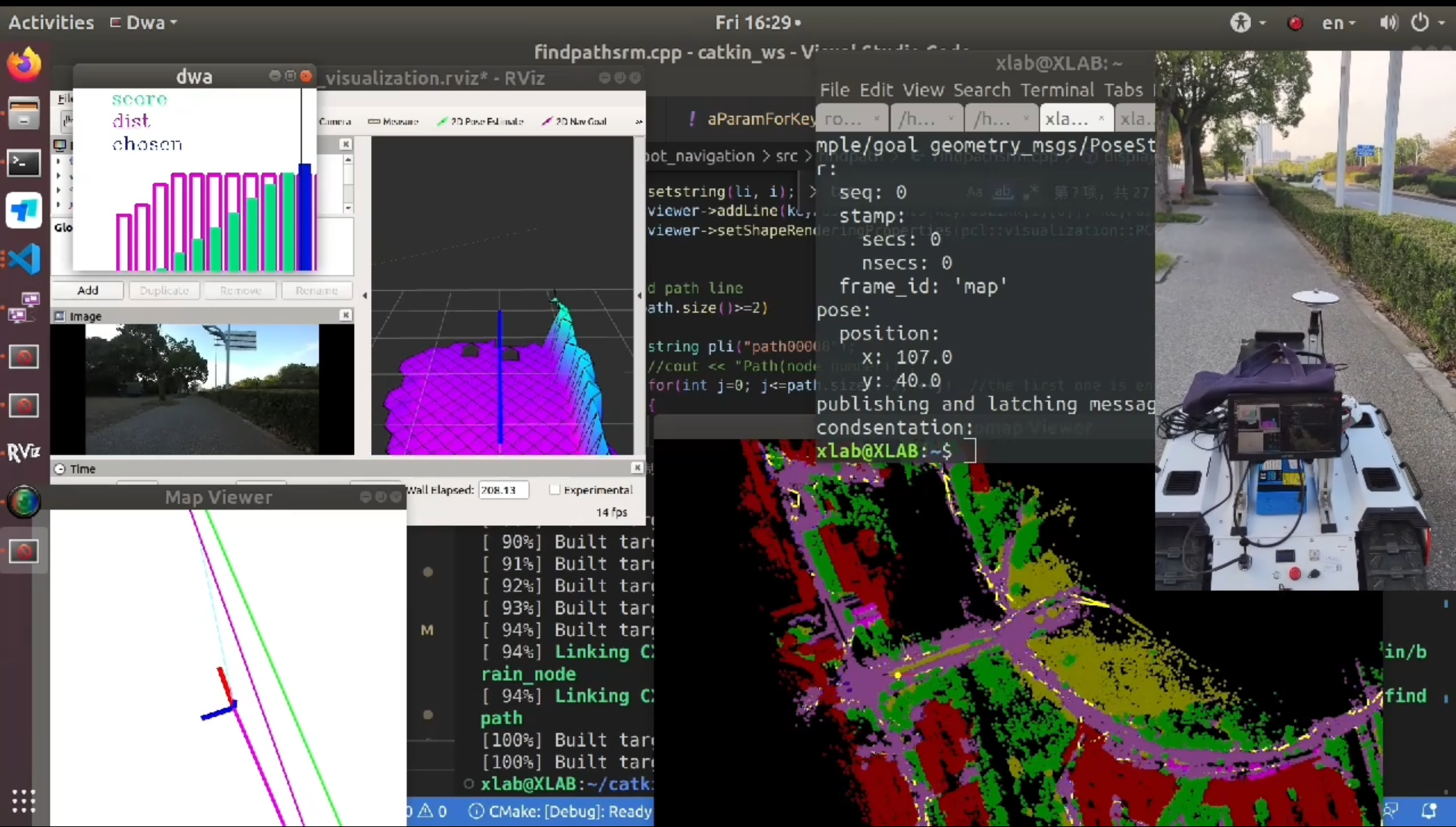
系统实机测试环境如上图所示。屏幕左上角为RGBD相机的RGB图像以及局部高程地图模块构造的实时地图,左下角为局部规划模块计算出的局部目的地,右上角为实验实时录像,右下角为三维语义拓扑地图。实验结果表明,无人车能够使用无人机构建的语义拓扑地图成功进行导航。

{kind=link}
{kind=link}
{kind=link}
{kind=link}