We aim to develop a robust autonomous ground robot system applied to a wide variety of scenes. It will be able to work according to given task and autonomously explore new environment without priori information. During the exploration, the robot can reconstruct the scene in sparse 3D map and/or in semantic object-level map, and recover its own trajectory in real time.
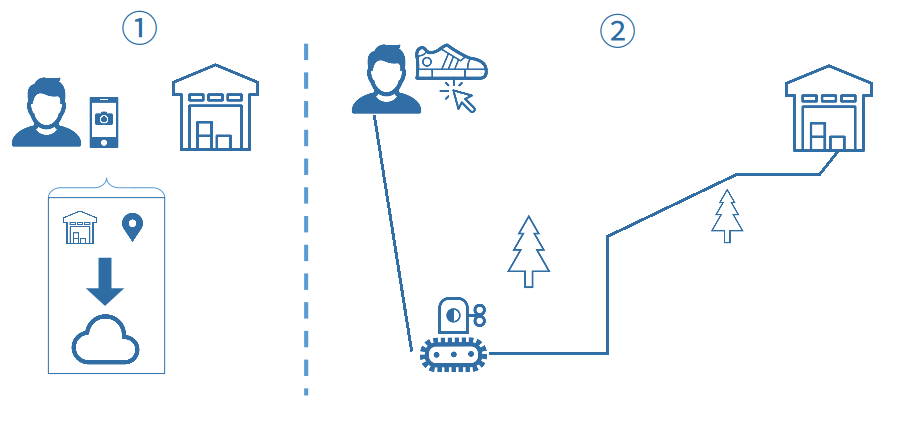
With the ability mentioned above, a typical implementation of the ground robot is
autonomous storage and transport service of commodities. Firstly, customers buy some goods on the Internet, and upload his location; Then, the robot will take those goods and autonomously plan its path and avoid obstacles in real time; Finally, customers will receive his goods at home.
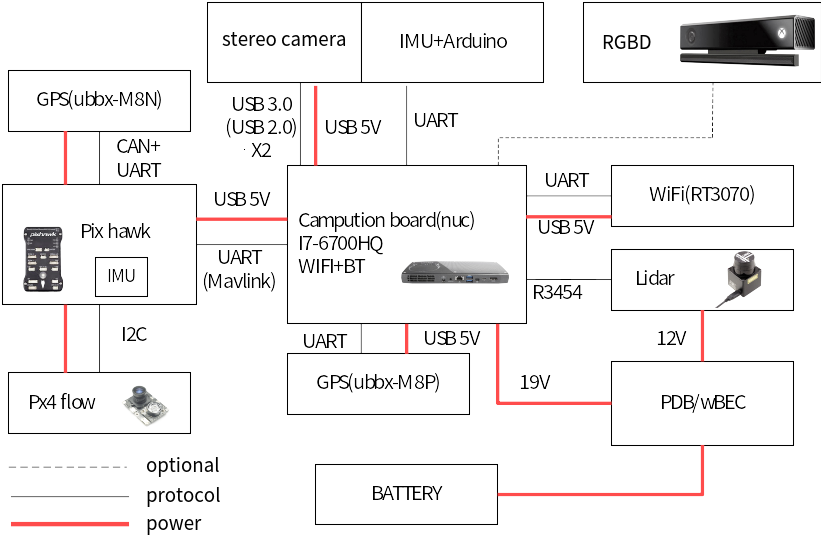
Hand-held platform
The hand-held platform can be used for data collection and algorithms testing. It has the same sensors and devices we need on ground robot except for the power system. The basic design are showed below.