背景
在定位导航功能问题中,传感器融合是常见的方法之一。传感器的互补特性可以提升实际应用的适应性及准确性。在所有的常用传感器中,GNSS与视觉传感器具有显着的互补特性。因此研究GNSS与视觉传感器的融合问题对提升导航精度与稳定性有着显著的意义
算法
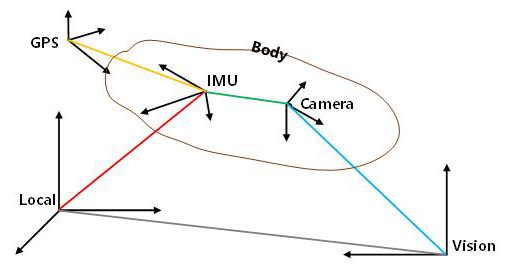
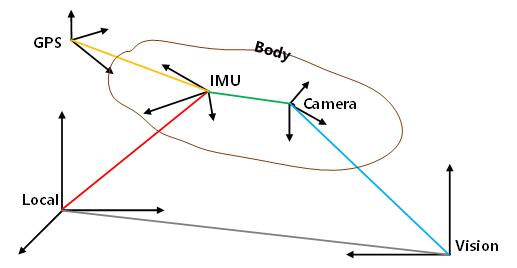
本方法提出了将GNSS与视觉SLAM系统进行紧耦合联合解算的方法,将GNSS卫星与视觉特征点约束应用于整体的代价函数。算法示意图如下。
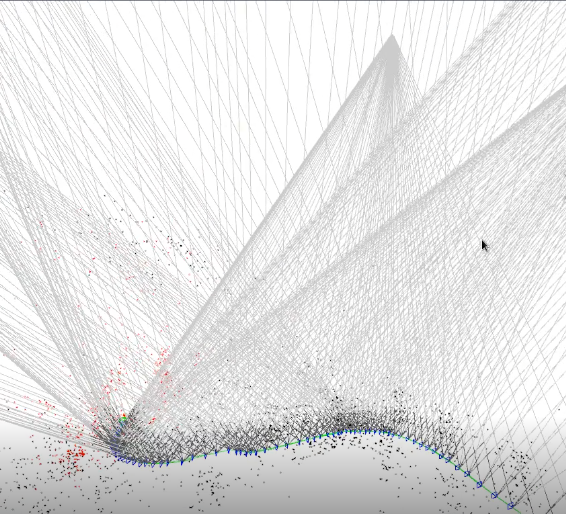
图 1 视觉特征点与卫星点的共同约束下的定位解算
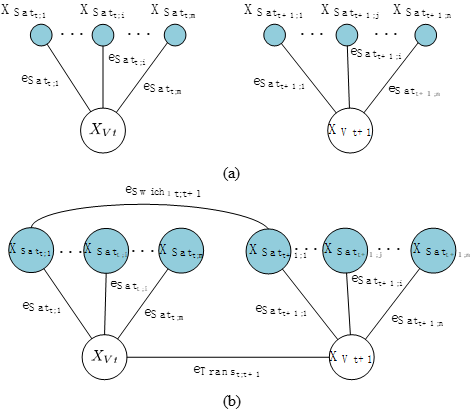
图 2 图优化GNSS解算框架
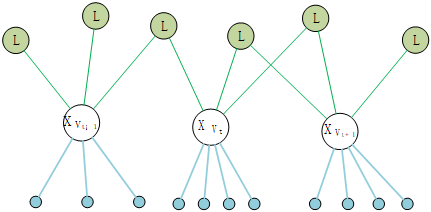
图 3 GNSS视觉联合解算图优化框架
效果及应用
相比于传统单纯的视觉算法与GNSS定位算法,本方法提供了对大尺度下对于视觉尺寸漂移的修正,并且由于视觉的局部高精度提升了GNSS的定位精度。

图 4 试验平台及测试场景
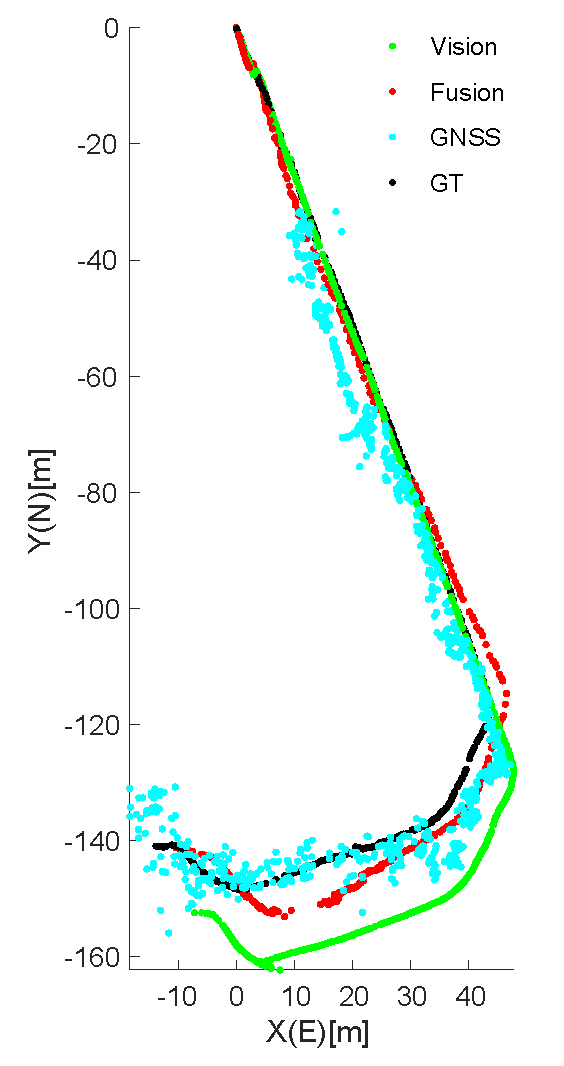
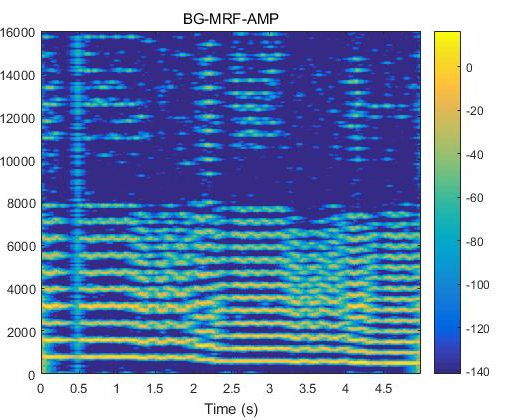
图 5 实验数据结果


{kind=link}
{kind=link}
{kind=link}
{kind=link}